Nová éra KepLErGO s FLL
Letos jsme v soutěži měli zajímavé postavení, sestavou jsme byli zcela nový tým, avšak název jsme převzali od úspěšného, teď už na účast příliš starého, týmu, na jehož odkaz jsme navázali. Vzhledem k výsledkům našich předchůdců od nás zbytek soutěžících týmů očekával lepší výkony, než jsme nakonec podali. I přesto máme z výsledku radost, jelikož jsme se, na úkor výsledků, rozhodli nepřevzít od předchozího týmu konstrukci robota spolu s kódem a místo toho vyhotovit vlastní řešení.
Jako nově sestavený tým jsme měli začátky poměrně krušné, chvíli trvalo se zorientovat v novém prostředí a především si v rámci týmu rozdělit práci. Tyto nedostatky se nejvíce podepsaly na inovačním projektu, který zdaleka nenaplnil svůj potenciál a jehož zlepšení by mohl být náš hlavní cíl do nadcházející sezóny. Do příště tak máme hlavně cenné zkušenosti se soutěží, které by týmu mohly pomoci podat následující rok lepší výkon.

Příprava na soutěž
Díky našemu štědrému sponzorovi, certicon, jsme po minulém týmu měli zařízenou kancelář v Dejvicích s veškerým nutným vybavením (pc, lego, tabule, kávovar, kolečkové židle, neomezený přísun kostkového cukru). Prvních několik měsíců jsme v kanceláři téměř nebyli, se stupňující se časovou nouzí jsme tam trávili více a více času, ke konci i 8 hodin denně, čtyři dny v týdnu. Po celou dobu jsme se však zabývali výhradně robotem, takže inovační projekt, kterému jsme za několik měsíců věnovali maximálně 20 minut, jsme dokončovali v posledním, i tak dosti nabitém týdnu, což se na jeho kvalitách značně podepsalo.
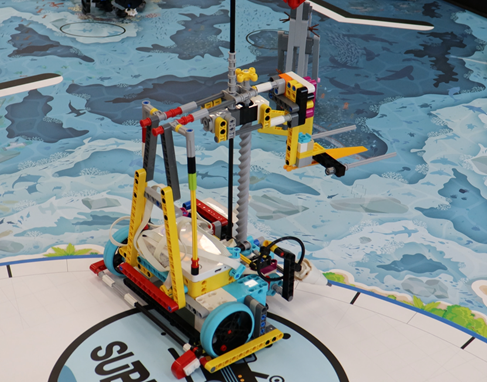
Samotný robot byl založen na principu jednoduchého pojezdného základu, na kterém byl umístěn boční motor pro jednoduché pohyby těsně nad zemí pro plnění specifických úloh a zvedací mechanismus. Na něj se připínaly různé nástavce hlavně v závislosti na výšce zvedaného předmětu. Pro využití zvedáku jsme se rozhodli poté, co jsme zjistili, že většina úloh, které jsme chtěli udělat, byla splnitelná jednoduchým nástavcem s pohybem všemi směry. Cílem tedy byl systém háku s trojrozměrným pohybem, což se nám povedlo díky zvedacímu mechanismu, popojíždění robotem dopředu a dozadu a pohybování do stran protichůdným pohybem kol, tedy rotací robota kolem své osy. Myslíme si, že tato taktika byla poměrně účinná, robot byl mimo jiné řádově jednodušší než roboti ostatních týmů a zároveň se jim výkonnostně mohl častokrát vyrovnat.
Průběh soutěže
Po příchodu nám byla přidělena místnost, kterou jsme sdíleli s dalším týmem. Před soutěží jsme dokončili prezentaci k inovačnímu projektu. Poté následovaly testovací jízdy, které proběhly úspěšně. Pak nastala prezentace inovačního projektu skládající se ze dvou částí: konstrukce robota a technická inovace na téma “Oceány a moře”. Po prezentaci následovala první jízda robota “na ostro”. Kvůli technické chybě v kódu související s resetováním hodnot na gyroskopu jsme jednu ze čtyř částí, do kterých jsme si herní plán rozdělili nezajeli s předpokládaným počtem bodů. V následné pauze jsme sice kód opravili, ale již jsme měli smůlu, takže jsme první bodové skóre nepřekonali.
I přes drobný neúspěch bylo velmi zajímavé sledovat násobně propracovanější a komplexnější mechanismy robotů ostatních týmů, ač nebyly vždy efektivnější.
Byť byla soutěž zajímavá, tým byl bohužel v tomto složení nebyl nejsilnější. Proto budeme příští rok pokračovat velmi pravděpodobně ve značně pozměněné sestavě.
I tak ale děkujeme za možnost zúčastnit se v takto dobrých podmínách i trpělivost původního týmu, bez kterého bychom se do toho určitě nepustili.